

Questo articolo fornisce una panoramica della topologia di controllo degli alimentatori DCS-Control (trade mark di TI) a frequenza fissa, esaminando l’eccellente risposta ai transitori, la frequenza di commutazione costante e sincronizzabile, la modalità di risparmio energetico a basso ripple e la flessibilità per correnti più elevate.
Uno svantaggio comune delle topologie di controllo COT (constant on-time) è la variazione della frequenza di commutazione e l’impossibilità di sincronizzarsi con un clock esterno. La topologia DCS-Control a frequenza fissa di Texas Instruments con transizione continua alla modalità di risparmio energetico si basa sulla popolare topologia COT DCS-Control con la sua risposta rapida ai transitori e con l’aggiunge un oscillatore per ottenere il funzionamento a frequenza fissa con un clock di sincronizzazione opzionale. Questa combinazione consente applicazioni che richiedono sia una risposta rapida ai transitori che requisiti specifici di rumore o frequenza.
Altre caratteristiche come il rilevamento differenziale remoto, il control loop di compensazione esterno e l’elevata flessibilità, supportano i severi requisiti ai transitori dei processori con correnti elevate presenti in applicazioni sensibili al rumore, tra cui infotainment automobilistico, sistemi avanzati di assistenza alla guida (ADAS), moduli ottici per apparecchiature di comunicazione, sistemi industriali di misurazione e test, medicina, aerospaziale e difesa.
Panoramica della topologia DCS-Control
La Figura 1 mostra lo schema a blocchi di base della topologia DCS-Control. Sia i pin di rilevamento della tensione di uscita (VOS) che quelli di feedback (FB) forniscono gli input al circuito di controllo per una corretta regolazione. Il pin VOS fornisce la risposta transitoria rapida della topologia alimentando direttamente la tensione di uscita in una rampa e quindi nel comparatore, dove influisce immediatamente sul punto operativo. Il pin FB è un percorso con larghezza di banda inferiore che fornisce una regolazione del setpoint DC estremamente accurata. Se combinati nel DCS-Control, il percorso AC del pin VOS e il percorso DC del pin FB forniscono una tensione di uscita precisa che risponde rapidamenteai transitori di carico.
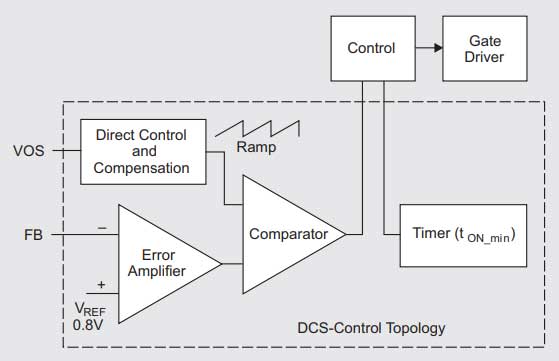
Figura 1. Diagramma a blocchi della topologia DCS-Control.
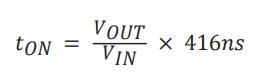
Una topologia COT come DCS-Control imposta il tempo di attivazione con un timer. Regolando questo tempo di attivazione con la tensione di ingresso e di uscita, il timer fornisce un funzionamento a frequenza ragionevolmente costante per la maggior parte dei cicli di lavoro in modalità PWM (modulazione di larghezza di impulso). L’equazione 1 mostra un esempio, dove 416ns è il periodo per una frequenza di commutazione di 2,4 MHz.
Tuttavia, la frequenza di commutazione non è sufficientemente precisa per le applicazioni che richiedono il funzionamento all’interno o all’esterno di una banda di frequenza specifica. Queste applicazioni generalmente richiedono l’impostazione della frequenza di commutazione con un oscillatore, come nel controllo della modalità di tensione o corrente, e in alcuni casi, la capacità di sincronizzarsi con un segnale di clock del sistema. Questo articolo fornisce ulteriori informazioni sulla variazione di frequenza nella topologia DCS-Control.
Panoramica della topologia DCS-Control a frequenza fissa
La Figura 2 mostra uno schema a blocchi di base della topologia di DCS-Control a frequenza fissa, come implementato nel convertitore buck da 15 A TPS62873. L’aggiunta di un oscillatore consente l’impostazione diretta della frequenza di commutazione (fSW) allo stesso modo del controllo in modalità tensione o corrente. La presenza di un ingresso per oscillatore nel circuito di controllo offre inoltre la possibilità di sincronizzare la frequenza di commutazione con un segnale di clock.
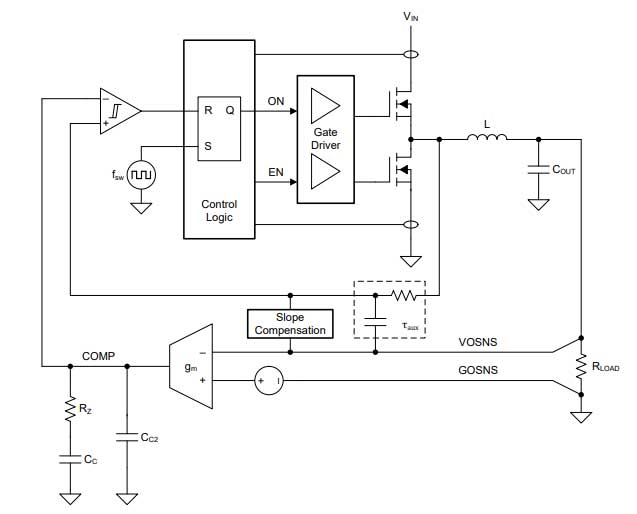
Figura 2. Diagramma a blocchi della topologia DCS-Control a frequenza fissa con oscillatore implementato nel TPS62873, rilevamento remoto differenziale, amplificatore a transconduttanza e comparatore con isteresi.
Il DCS-Control a frequenza fissa, solitamente utilizzato in dispositivi a corrente più elevata, utilizza il rilevamento remoto differenziale. Il dispositivo effettua la regolazione sulla base della tensione presente tra i pin VOSNS e GOSNS connessi, tramite le piste del PCB, direttamente ai capi del carico. Il rilevamento sul carico supera e compensa non solo le cadute di tensione DC sui piani e sulle tracce del PCB, ma anche i ritardi derivanti dall’induttanza tra il dispositivo e il carico. Entrambe queste caratteristiche sono importanti per mantenere una regolazione molto rigorosa nell’intero intervallo di carico e durante i transitori.
I segnali differenziali raggiungono così l’amplificatore a transconduttanza (gm), che confronta la loro differenza con il setpoint della tensione di uscita. (Per semplicità, la Figura 2 mostra questo setpoint come una sorgente di tensione in serie con il segnale GOSNS.) Il pin COMP fornisce l’uscita di questo amplificatore, che è compensata con una rete di Tipo II (one pole, one zero) a terra.
Questa compensazione esterna consente di ottimizzare il circuito di controllo in base a qualsiasi esigenza: dai sistemi con transitori di carico elevati con grande capacità di uscita, fino ai sistemi con transitori di carico piccoli o assenti con capacità di uscita molto ridotta e dimensioni ridotte. A differenza del DCS-Control, il percorso di feedback veloce passa attraverso questo amplificatore, e non immediatamente al comparatore, per poter aumentare o diminuire il guadagno selezionando il componente di compensazione. Se è necessaria una risposta transitoria più forte, si aumenta il guadagno e si aggiunge più capacità di uscita. Se nell’applicazione non sono presenti transitori forti, va diminuito il guadagno utilizzando una piccola capacità di uscita, anche al fine di ridurre le dimensioni.
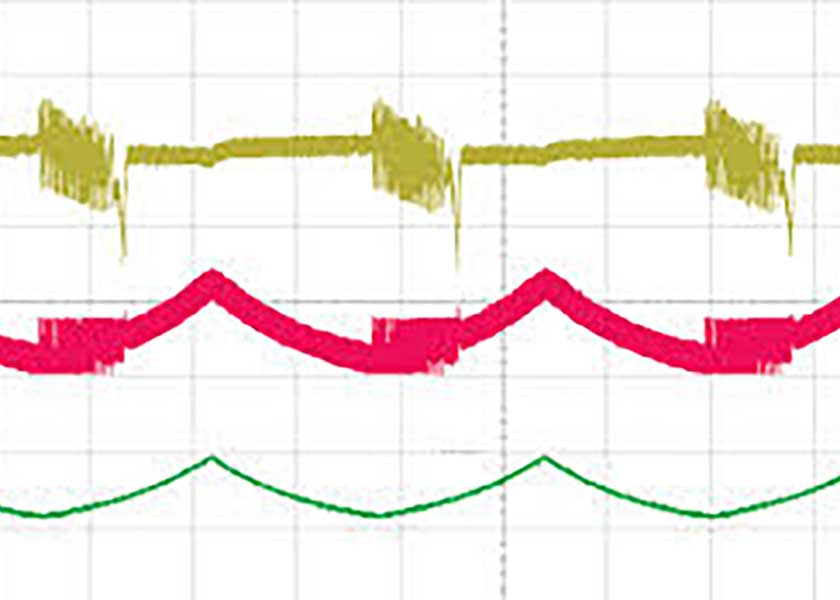
La possibilità di regolare la risposta ai transitori in base alle esigenze dell’applicazione consente una regolazione più rigorosa in caso di transitori più intensi rispetto a quanto è possibile fare con la precedente topologia DCS-Control e soddisfa i requisiti di processore esigenti come Jacinto J7 di Texas Instruments o EyeQ6 di MobileEye. La Figura 3 mostra uno stack di tre convertitori buck TPS62876-Q1 che forniscono un transitorio di carico da 46 A, mantenendo la tensione di uscita entro ±2% del setpoint di 0,875 volt.
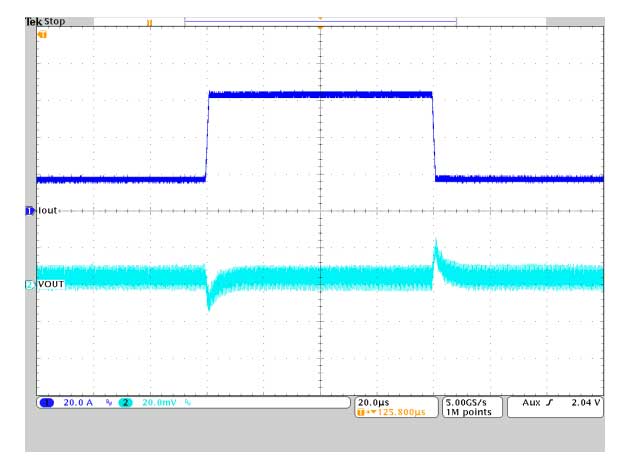
Figura 3. La risposta transitoria del DCS-Control a frequenza fissa è adattabile ai transitori di carico più gravosi per una eccellente regolazione.
Un comparatore con isteresi confronta l’uscita del pin COMP e una replica della corrente dell’induttore, creata dalla rete τaux, con la compensazione della pendenza per prevenire oscillazioni subarmoniche. L’uscita del comparatore aziona il circuito di latch Set-Reset (SR), insieme al clock, che controlla i gate driver e il funzionamento del dispositivo. L’oscillatore controlla che la commutazione avvenga esattamente alla frequenza di commutazione.
Il latch Set-Reset è una rappresentazione semplificata del funzionamento dettagliato del blocco di controllo ed è implementato per mantenere la natura veloce con isteresi del DCS-Control e consentire quindi una risposta immediata ai transitori di carico. Ad esempio, durante un transitorio di stacco del carico (dove la tensione di uscita aumenta), l’uscita del comparatore ha la priorità sul segnale di clock.
Il convertitore estende il tempo di inattività del MOSFET high-side secondo necessità per ridurre la tensione di uscita con un superamento minimo. Si tratta di un comportamento intrinsecamente migliorato rispetto al controllo della modalità di corrente di picco dei libri di testo, che cambia ad ogni ciclo di clock, continuando ad aggiungere energia all’uscita, anche quando è troppo alta. Riducendo il superamento della tensione di uscita, il convertitore riduce significativamente la capacità di uscita, che ha un impatto fondamentale sul costo e sulle dimensioni dell’alimentatore.
Variazione della frequenza di commutazione
Oltre a mantenere la rapida risposta ai transitori, che può essere ulteriormente migliorata e ottimizzata tramite la compensazione esterna sul pin COMP, il controllo DCS a frequenza fissa fornisce una frequenza di commutazione fissa con una stretta tolleranza. Poiché la frequenza di commutazione viene impostata direttamente con un oscillatore anziché controllata indirettamente con un timer di accensione, la tolleranza della frequenza è specificata nella scheda tecnica specifica del dispositivo. La Tabella 1 e la Tabella 2 confrontano le specifiche della frequenza di commutazione del TPS62876-Q1, utilizzando la topologia DCS-Control a frequenza fissa, con le specifiche della frequenza tipica del convertitore DCS-Control step-down TPS62869.
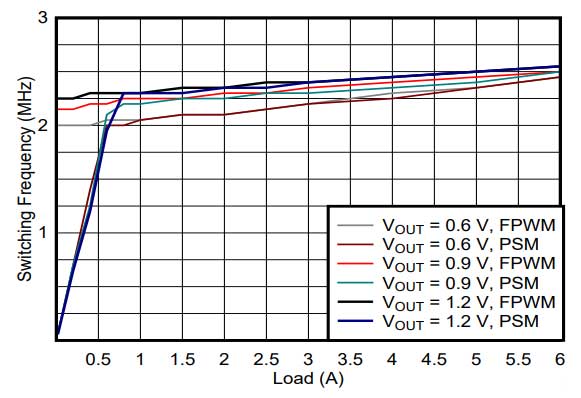
Tabella 1. Utilizzando la topologia DCS-Control a frequenza fissa, il TPS62876-Q1 specifica una tolleranza del ±10% delle sue quattro opzioni di frequenza di commutazione sull’intero intervallo di temperatura e tensione di ingresso.
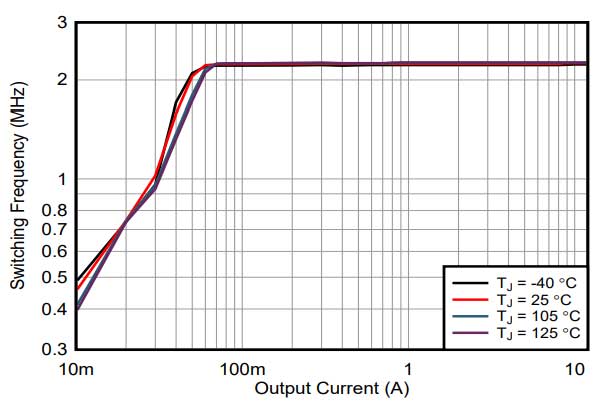
Tabella 2. Il TPS62869, utilizzando DCS-Control, specifica solo una frequenza di commutazione tipica.
La Figura 4 e la Figura 5 confrontano la variazione effettiva della frequenza di commutazione rispetto alla corrente di carico in un’applicazione. Entrambi i dispositivi supportano la modalità di risparmio energetico, che riduce la frequenza a correnti di carico inferiori (verso sinistra in entrambi i grafici). Il funzionamento in modalità PWM (a correnti più elevate) si traduce in una frequenza di commutazione controllata con precisione per il DCS-Control a frequenza fissa, mentre la frequenza di commutazione del DCS -Control aumenta leggermente con l’aumento del carico. Nella modalità PWM forzata (non mostrata), il DCS-Control a frequenza fissa mantiene la sua frequenza costante anche senza carico.
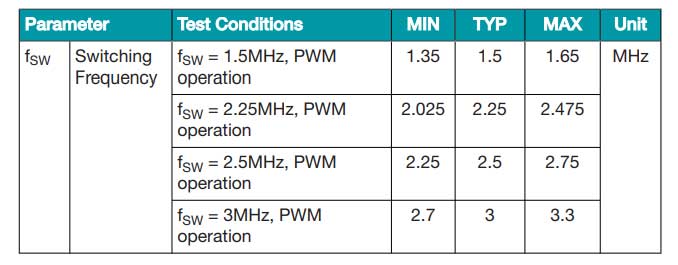
Figura 4. Variazione della frequenza di commutazione del TPS62869 con DCS-Control.

Figura 5. Variazione della frequenza di commutazione del modulo di potenza TPSM8287A12 con cDCS-Control a frequenza fissa.
Oltre alla modalità di risparmio energetico, ci sono due condizioni in cui la frequenza di commutazione può deviare dalla frequenza impostata dall’oscillatore: durante un transitorio di carico forte e se viene raggiunto il tempo di attivazione minimo.
Quando si applica un carico pesante, il MOSFET high-side potrebbe restare acceso per un periodo superiore a un periodo di commutazione completo e, quando si rimuove un carico pesante, potrebbe rimanere spento per un periodo superiore a un periodo di commutazione completo. Entrambi gli scenari danno come risultato uno o più impulsi che non sono presenti a causa dei tempi di attivazione o disattivazione prolungati.
Se viene raggiunto il tempo di accensione minimo del MOSFET high-side, sia il DCS-Control a frequenza fissa che il DCS-Control riducono la frequenza di commutazione per soddisfare il tempo di accensione minimo e mantenere la regolazione della tensione di uscita.
Si tratta di prestazioni migliorate rispetto ad alcuni dispositivi in modalità corrente che mantengono la frequenza ma lasciano aumentare la tensione di uscita per soddisfare il tempo di attivazione minimo richiesto. Mentre sia il DCS-Control a frequenza fissa che il DCS-Control riducono la frequenza di commutazione allo stesso modo, il DCS-Control a frequenza fissa presenta meno condizioni operative durante le quali viene raggiunto il minimo on-time e la frequenza viene ridotta, a causa del suo on-time minimo inferiore.
Ad esempio, il TPS62876-Q1 specifica il valore massimo di 44 ns del tempo di accensione minimo con una tensione di ingresso di 5 V e per tutta la temperatura operativa. Un valore così basso dell’on-time minimo consente applicazioni con tensione di uscita più bassa nel settore automobilistico, aerospaziale e della difesa, e di funzionare, ad esempio, nella regione di frequenza più elevata talvolta richiesta dal sistema complessivo.
Modalità di risparmio energetico con ripple inferiore
Mentre la maggior parte delle applicazioni utilizza un dispositivo DCS-Control a frequenza fissa in modalità PWM forzata per ottenere un ripple di uscita inferiore con carichi leggeri e una migliore risposta ai transitori, la topologia supporta una modalità di risparmio energetico per aumentare l’efficienza con carichi leggeri.
Per mantenere la frequenza di commutazione target e fornire un ripple inferiore alle correnti di carico più basse, il DCS-Control a frequenza fissa riduce il tempo di attivazione in modalità di risparmio energetico, mentre il DCS-Control mantiene costante il tempo di attivazione. Entrambe le topologie entrano in modalità di risparmio energetico quando la corrente dell’induttore diventa discontinua, il che crea un ripple leggermente più elevato rispetto alla modalità PWM.
Invece di ridurre la frequenza con lo stesso tempo di accensione, la modalità di risparmio energetico del DCS-Control a frequenza fissa riduce il tempo di accensione mantenendo la stessa frequenza. La riduzione del tempo di attivazione fornisce meno energia all’uscita, riducendo così la tensione di ondulazione rispetto al DCS-Control. Una volta che il tempo di attivazione si riduce al minimo, il salto degli impulsi riduce ulteriormente la potenza di uscita per i carichi più leggeri.
Saltando gli impulsi si riduce anche la frequenza. La Figura 4 e la Figura 5 mostrano la differenza nella riduzione della frequenza in modalità di risparmio energetico. Il dispositivo DCS-Control a frequenza fissa riduce la propria frequenza al di sotto dei carichi di 60 mA circa, mentre il dispositivo DCS-Control inizia a ridurre la frequenza intorno a 500 mA. Sebbene questi valori di corrente siano diversi a seconda dei dispositivi e delle condizioni operative, il DCS-Control a frequenza fissa mantiene la frequenza di commutazione fino a correnti di carico inferiori, con conseguente ripple inferiore.
Funzionamento in parallelo per correnti di carico superiori (o inferiori)
Solitamente, i core dei processori richiedono correnti sempre più elevate per ogni successiva generazione di processori.
D’altro canto, alcune applicazioni potrebbero non utilizzare tutte le funzionalità di un determinato processore o potrebbero utilizzare un processore con meno capacità all’interno della stessa famiglia di processori, con conseguenti requisiti di corrente inferiori. Per aumentare o diminuire la capacità di corrente dell’alimentatore è necessaria poter utilizzare più sistemi in parallelo aggiungendo o rimuovendo ulteriori blocchi di alimentazione al variare dei requisiti.
I dispositivi DCS-Control a frequenza fissa supportano le opzioni di stacking. Sebbene i dettagli specifici dell’implementazione varino leggermente tra ciascuna famiglia di dispositivi, le funzionalità includono la condivisione della corrente, l’interleaving delle fasi e la semplicità dell’interfaccia.
La condivisione della corrente avviene tramite il pin COMP. Poiché il pin COMP è essenzialmente il punto operativo del segnale di piccole dimensioni, la condivisione del segnale di questo pin tra tutti i dispositivi impilati consente al DCS-Control a frequenza fissa di raggiungere in genere una precisione di condivisione della corrente inferiore al 10%.
L’interlacciamento di fase è realizzato da un pin SYNC_OUT dedicato, che si collega al pin di ingresso MODE/SYNC del dispositivo successivo nello stack. SYNC_OUT viene automaticamente sfasato per fornire la cancellazione dell’ondulazione. Attraverso questo semplice collegamento a catena, tutti i dispositivi nello stack funzionano alla stessa frequenza e con un’ondulazione inferiore rispetto a un design monofase. È possibile impilare un gran numero di convertitori e ottenere un ottimo bilanciamento di fase senza dover specificare il numero di dispositivi nello stack.
Quando ci si interfaccia allo stack tramite I2C, la comunicazione avviene solo al dispositivo primario – non a ciascun dispositivo nello stack – per regolare la tensione di uscita, modificare la modalità operativa o rileggere i registri di errore. L’interfacciamento con un singolo dispositivo semplifica notevolmente il sovraccarico di comunicazione e l’instradamento del PCB riducendo sia il numero di letture e scritture sia il numero di segnali PCB che necessitano di instradamento.
Conclusione
Con la sua rapida risposta ai transitori e la sua capacità di stacking, il DCS-Control a frequenza fissa supporta gli esigenti requisiti di transitori di carico e corrente di uscita dei processori più recenti, mentre il funzionamento e la sincronizzazione a frequenza fissa lo rendono ideale per le applicazioni sensibili al rumore. Ne traggono vantaggio gli ADAS automobilistici e l’infotainment, i moduli ottici, i sistemi di test e le misurazioni industriali, le applicazioni mediche, aerospaziali e di difesa. La compensazione adattabile del circuito di controllo esterno supporta una risposta transitoria rapida con la quantità minima di capacità di uscita, riducendo le dimensioni e il costo di un sistema di alimentazione.
Chris Glaser è Applications Engineer SMTS presso Texas Instruments.

{kind=link}