

Questo articolo tecnico contiene considerazioni di progetto sull’impiego della tecnologia GaN nei motor-driver come il DRV7308 di Texas Instruments nonché valutazioni sull’incremento dell’efficienza e sul miglioramento delle prestazioni dei motori che questi componenti sono in grado di garantire.
Per classificare il consumo energetico e l’efficienza degli elettrodomestici, dei sistemi di riscaldamento, ventilazione e condizionamento dell’aria (HVAC) e degli azionamenti industriali, vengono utilizzati programmi di valutazione quali il Seasonal Energy Efficiency Ratio (SEER), il Minimum Energy Performance Standards (MEPS), Energy Star e Top Runner
In questo settore, i driver a frequenza variabile (VFD) offrono la migliore efficienza nei sistemi di riscaldamento e raffreddamento, soprattutto se hanno un intervallo di controllo della velocità accurato e molto ampio. I VFD utilizzano un inverter per controllare le velocità del motore, insieme alla commutazione PWM ad alta frequenza per ottenere un controllo della velocità veramente variabile.
Questi inverter sono attualmente realizzati utilizzando transistor IGBT o MOSFET come interruttori di potenza e presentano una limitata frequenza di commutazione ed elevate perdite complessive. Tuttavia, grazie ai progressi nella tecnologia a banda larga, in particolare con gli interruttori di potenza basati su nitruro di gallio (GaN),è possibile aumentare in maniera significativa la densità e l’erogazione di potenza nonché l’efficienza degli azionamenti motore.
In che modo la tecnologia GaN aumenta l’efficienza dell’inverter
Le perdite di conduzione attribuibili ai FET GaN sono proporzionali alla resistenza in conduzione del dispositivo, in modo simile a un MOSFET. Per gli IGBT le perdite di conduzione dipendono dalla tensione di ginocchio (knee voltage) e dalla resistenza dinamica in stato attivo, che sono in genere più elevate rispetto ai FET GaN o ai MOSFET.
Per quanto riguarda le perdite di commutazione, i FET GaN offrono perdite molto inferiori rispetto ai MOSFET e agli IGBT per i seguenti motivi:
- Il GaN offre reverse recovery pari a zero. Con zero reverse recovery è possibile commutare un GaN FET a una velocità di variazione della corrente (di/dt) e una velocità di variazione della tensione (dv/dt) molto elevate. Nei MOSFET, il body diode soffre di un elevato zero reverse recovery, limitando la commutazione di/dt e dv/dt e causando perdite aggiuntive nonché al fenomeno del phase-node voltage ringing. Negli IGBT, anche l’aggiunta di un diodo antiparallelo ottimizzato può comunque causare problemi correlati al reverse recovery.
- Durante lo spegnimento, gli IGBT soffrono di corrente di ricombinazione dei portatori minoritari, comunemente nota tail current, fenomeno non presente dei dispositivi GaN.
- I dispositivi GaN offrono una capacità inferiore rispetto agli IGBT e ai MOSFET, con conseguenti minori perdite di commutazione capacitiva.
- Un di/dt controllato e più veloce e un dv/dt controllato aiutano a ottimizzare le perdite di overlap tensione-corrente durante la commutazione.
La Figura 1 mostra un confronto teorico dell’efficienza tra soluzioni di inverter basate su GaN, IGBT e MOSFET con una frequenza di commutazione di 20 kHz, con lo slew rate del GaN limitata a 5 V/ns e con una temperatura ambiente di 55 °C. Come si vede, la soluzione GaN aiuta riduce alla metà le perdite di potenza.
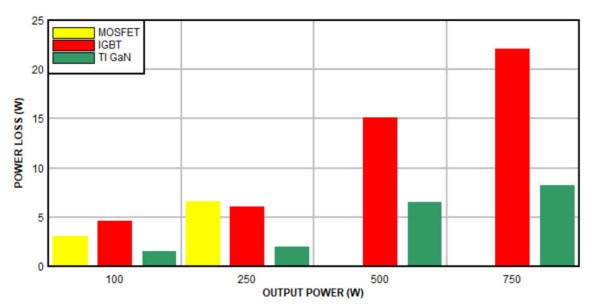
Figura 1. Confronto dell’efficienza delle soluzioni GaN, MOSFET e IGBT.
La Figura 2 confronta l’efficienza del modulo di alimentazione intelligente (IPM) GaN trifase DRV7308 di Texas Instruments con un IPM IGBT con picco di corrente nominale di 5 A, con un’alimentazione di 300 V DC, una frequenza di commutazione di 20 kHz, un motore della ventola con 2 m di cavo, una temperatura ambiente di 25 °C, una corrente di 0,85 ARMS e una potenza di uscita dell’inverter di 250W. Lo slew-rate dell’IPM GaN è configurato per 5 V/ns.
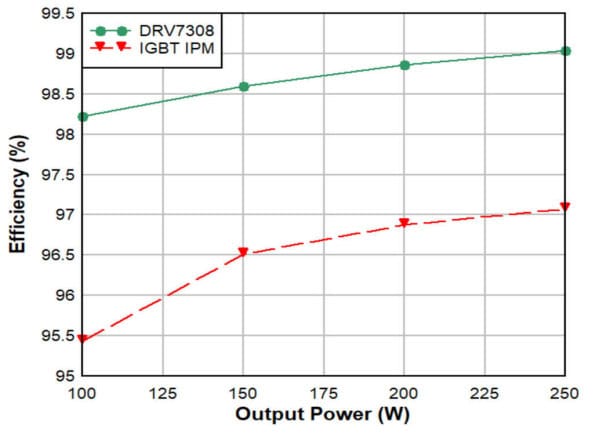
Figura 2. Confronto dell’efficienza del DRV7308 e di un IGBT IPM in un’applicazione da 250 W.
Miglioramenti delle prestazioni del motore con interruttori di potenza GaN
I motori sincroni a magnete permanente progettati per alta velocità e i motori con un’induttanza inferiore spesso necessitano di un’elevata frequenza PWM per ridurre l’ondulazione di corrente e ottenere prestazioni ottimali del motore. Esempi di apparecchiature finali includono asciugacapelli, soffiatori d’aria e pompe.
Un’ondulazione di corrente più elevata nell’avvolgimento del motore può causare un’ondulazione di coppia indesiderata, maggiori perdite nel motore e imprecisioni nella corrente media del motore rilevata durante la commutazione.
Gli IPM basati su MOSFET o IGBT sono in genere previsti per l’uso a 20 kHz; tuttavia, vengono normalmente utilizzati a una frequenza di commutazione inferiore (da 6 kHz a 16 kHz) a causa delle elevate perdite di commutazione. Con la tecnologia GaN che offre perdite di commutazione molto più basse anche a un dv/dt inferiore, è possibile commutare a una frequenza molto più elevata per migliorare l’efficienza e le prestazioni del motore.
La Figura 3 mostra lo schema a blocchi del DRV7308, che integra i pre-driver per tutti i FET GaN con controllo dello slew-rate della tensione phase-node. Il DRV7308 aiuta a raggiungere un’efficienza dell’inverter superiore al 99% per un’applicazione di azionamento motore da 250 W con FOC trifase in un package QFN (quad flat no-lead) da 12 mm per 12 mm, eliminando la necessità di un dissipatore di calore.
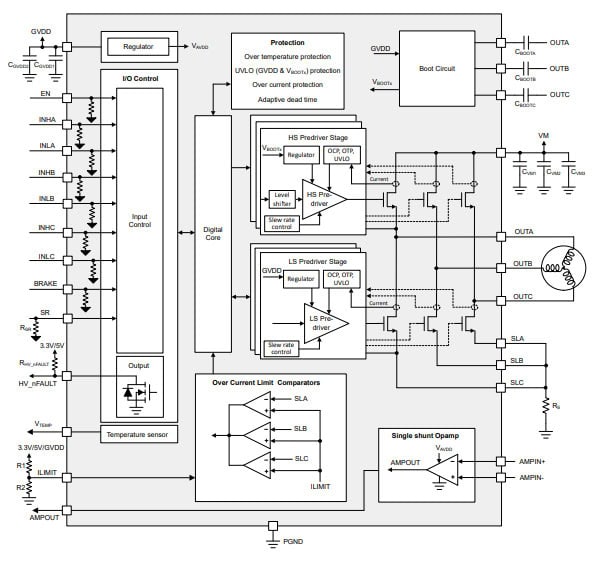
Figura 3. Diagramma a blocchi funzionali del DRV7308.
Considerazioni di progettazione quando si utilizza il GaN negli azionamenti motore.
I progettisti devono spesso considerare come il rapporto dv/dt influisce sull’isolamento del motore, sulla durata dei cuscinetti, sulle interferenze elettromagnetiche (EMI) e sull’affidabilità.
Il DRV7308 incorpora un circuito integrato pre-driver che agisce sul valore del dv/dt. È possibile controllare le impostazioni di slew-rate fino a 5 V/ns e configurare lo slew-rate come compromesso tra l’isolamento dell’avvolgimento del motore e l’ottimizzazione delle perdite di commutazione. Le impostazioni di slew-rate inferiori del DRV7308 coprono gli intervalli offerti dagli IGBT esistenti, mentre le velocità di slew-rate più elevate aiutano a mantenere le perdite di commutazione a valori molto più bassi.
La Figura 4 e la Figura 5 mostrano la tensione di commutazione fase-nodo del DRV7308 con un carico di 1 A, a 300 V, con un’impostazione di slew-rate di 10 V/ns e un cavo motore di 2 m. Lo zero inverse recovery del GaN FET con minori effetti parassiti e controllo dello slew-rate aiuta a ottenere una forma d’onda di commutazione della tensione particolarmente pulita.
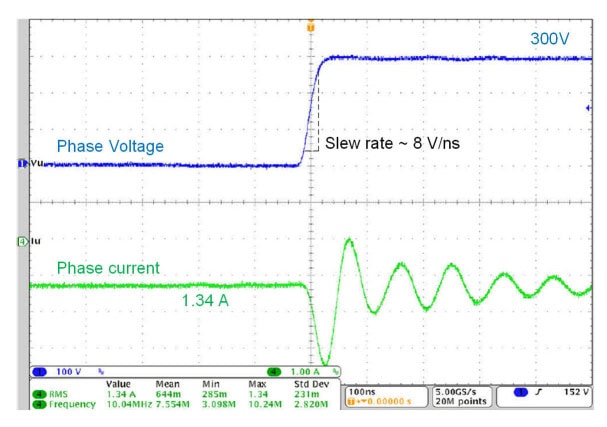
Figura 4. Velocità di variazione crescente della tensione fase-nodo con un cavo di 2 m e un motore della ventola.
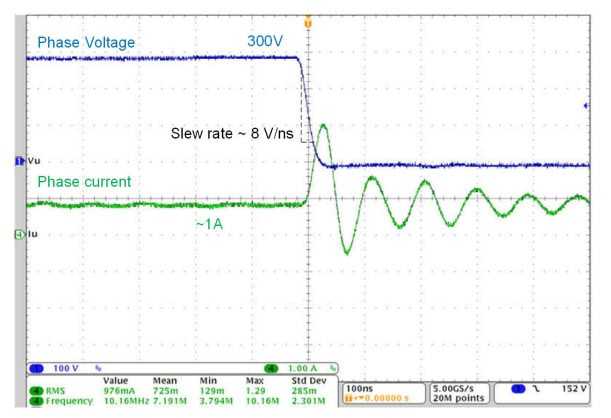
Figura 5. Velocità di variazione decrescente della tensione fase-nodo con un cavo di 2 m e un motore della ventola.
Impatto sull’efficienza del sistema
I sistemi di condizionamento dell’aria e refrigerazione spesso necessitano di una variazione molto ampia del controllo della velocità per ottenere la massima efficienza del compressore e del sistema di riscaldamento.
Gli IPM tradizionali con più di 1 µs di dead time e più di 500 ns di ritardo di propagazione limitano il ciclo di lavoro PWM operativo massimo e minimo e riducono l’intervallo di velocità operativa. Un dead time più elevato riduce anche la tensione disponibile al motore e aumenta la quantità di corrente del motore per la stessa erogazione di potenza. Il DRV7308 offre un dead time adattivo, con un tempo morto massimo inferiore a 200 ns e un ritardo di propagazione inferiore a 200 ns, aiutando i progettisti a migliorare l’intervallo del ciclo di lavoro PWM operativo e quindi l’intervallo di velocità, aumentando anche la tensione disponibile al motore.
Ad esempio, la capacità di ottenere una velocità da ultra bassa ad alta nei sistemi di condizionamento dell’aria aiuta i progettisti a impostare le velocità più elevate all’avvio in modo che i sistemi si raffreddino e si riscaldino più velocemente. Quindi, dopo aver raggiunto la temperatura impostata, i progettisti possono utilizzare un controllo più preciso della bassa velocità e della capacità, a seconda delle variazioni del carico di condizionamento dell’aria. Questo controllo più preciso e ottimale del punto di carico aiuta ad aumentare l’efficienza del sistema.
Dead time ultra basso e ritardo di propagazione, con bassa discrepanza di ritardo di propagazione, consentono un rilevamento accurato della corrente media e quindi aumentano la precisione del controllo, in particolare per gli azionamenti di controllo orientati al campo. La Figura 6 mostra l’impatto del ritardo di propagazione sulla precisione del rilevamento della corrente media. Il campionamento della corrente a metà del periodo di tempo di attivazione PWM otterrà la corrente media del motore in ogni ciclo PWM. La figura 6 illustra anche come il ritardo di propagazione devia il rilevamento della corrente dal valore medio.
L’errore nel rilevamento della corrente (ΔI) dipende dal ritardo di propagazione, dalla tensione applicata, dalla frequenza di commutazione PWM e dall’induttanza del motore. Per motori a bassa induttanza, l’errore sarà elevato. L’errore di rilevamento della corrente influisce anche sulla precisione del rilevamento della posizione del motore in un control-driver senza sensore. Un errore di stima della posizione del motore comporterà una riduzione dell’efficienza del motore. Il DRV7308, con ritardo di propagazione ultra basso e discordanza del ritardo di propagazione, aiuta a ottenere un rilevamento della corrente media accurato e migliora l’efficienza del motore.
Impatto sul rumore udibile
Nei sistemi di azionamento motore, una delle principali fonti di rumore udibile è l’ondulazione di coppia causata dalla distorsione di corrente. Per un motore, la distorsione di corrente dipende da molteplici fattori, tra cui la frequenza PWM, il dead time e la precisione di rilevamento della corrente.
Il DRV7308 offre perdite di commutazione significativamente ridotte e consente frequenze PWM più elevate rispetto alle soluzioni basate su IGBT o MOSFET. Con una frequenza di commutazione più elevata, l’ondulazione di corrente ridotta consente un’ondulazione di coppia bassa, oltre l’intervallo di frequenza udibile.
Nei sistemi basati su IGBT e MOSFET, il dead time è compreso tra 1 µs e 2 µs o più, con conseguente notevole distorsione della corrente del motore. La distorsione del dead time si verifica a ogni angolo elettrico di 60 gradi e si traduce in armoniche di sesto ordine sulla forma d’onda della corrente, che in genere rientra nell’intervallo di frequenza udibile. La logica adattiva del dead time del DRV7308 consente meno di 200 ns di dead time, con conseguente minima distorsione della corrente e quindi minore rumore udibile. La figura 7 confronta la distorsione armonica totale (THD) della corrente di avvolgimento del motore quando si testa il DRV7308 con un dead time di 0,2 μs e un IPM IGBT con un dead time di 2,5 μs. La distorsione del DRV7308 è molto bassa rispetto all’IPM IGBT. Questa distorsione aumenterà esponenzialmente per l’IPM IGBT a una potenza erogata inferiore a causa del basso ciclo di lavoro o del basso indice di modulazione dell’inverter, dove l’impatto del dead time è maggiore.
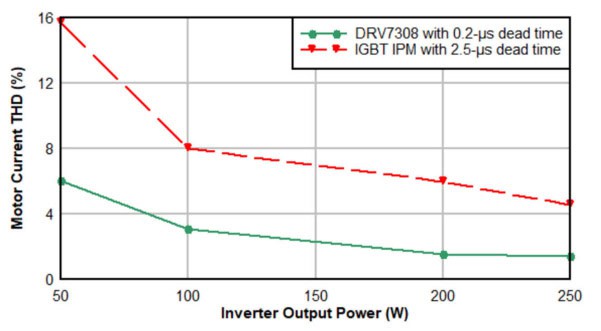
Figura 7. Confronto del THD della corrente del motore in funzione del dead time.
Considerazioni sulle emissioni condotte e irradiate
Le emissioni condotte e irradiate dipendono dalla frequenza di commutazione, dv/dt, di/dt, oscillazioni e riflessioni della tensione di commutazione e dall’area del loop di corrente di commutazione.
Il DRV7308 incorpora queste molteplici tecniche di progettazione e opzioni di layout del circuito stampato (PCB) per affrontare i problemi di compatibilità elettromagnetica ed EMI:
- Frequenza di commutazione PWM. Maggiore è la frequenza di commutazione, maggiore è l’impatto sullo spettro di frequenza EMI. Una frequenza di commutazione più elevata aiuta a ridurre l’ondulazione di corrente e i requisiti del condensatore per soddisfare le emissioni condotte. Il DRV7308 offre un’ampia gamma di frequenze di commutazione, da valori molto bassi fino a 60 kHz. I progettisti possono scegliere la frequenza ottimale in base alle prestazioni del sistema e ai requisiti EMI.
- dv/dt. Il pre-driver DRV7308 può controllare la velocità di variazione della commutazione fase-nodo per soddisfare i requisiti EMI.
- di/dt. Con zero reverse recovery e bassi livelli parassiti, il GaN può offrire migliori prestazioni di commutazione senza creare sovra elongazioni di tensione e oscillazioni al nodo di fase durante la commutazione. La Figura 4 e la Figura 5 mostrano la commutazione pulita del DRV7308, che si traduce in minori EMI.
- Piccola area del loop di corrente di commutazione. I condensatori di disaccoppiamento locali forniranno correnti impulsive durante la commutazione. Il DRV7308 è progettato in modo tale che l’area del loop di corrente di commutazione al condensatore di disaccoppiamento della tensione DC (CVM) sia minima, come mostrato nella Figura 8.
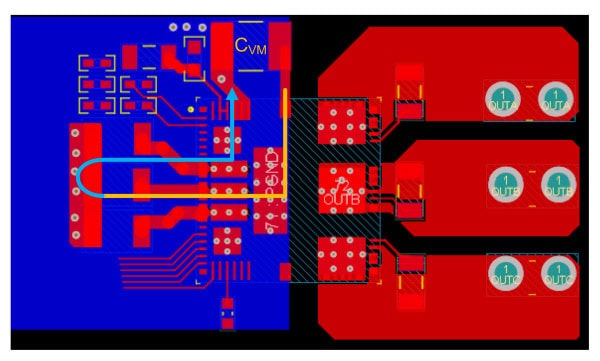
Figura 8. Tipico riferimento di layout del DRV7308, che illustra l’area del piccolo loop di corrente.
Impatto sulle dimensioni della soluzione
Oltre alle dimensioni ridotte del package e alla rimozione del dissipatore di calore, il DRV7308 offre un’integrazione di alto livello, tra cui un amplificatore operazionale per il rilevamento della corrente del motore, tre comparatori per la limitazione della corrente, un sensore di temperatura e una serie di funzioni di protezione. Queste integrazioni consentono una riduzione delle dimensioni della scheda inverter fino al 55% rispetto alle soluzioni basate su IGBT o MOSFET.
La riduzione delle dimensioni consente inoltre l’integrazione dell’inverter vicino al motore, il che è vantaggioso in casi d’uso quali ventole, soffianti e pompe, ed elimina la necessità di cablaggio dalla scheda inverter al motore.
L’eliminazione di questo cavo rimuove anche le perdite di commutazione attribuite alla capacità del cavo e allevia le EMI condotte e irradiate causate da cavi lunghi.
Progetti di sistema protetti e affidabili
Il GaN necessita di una protezione da sovracorrente più rapida e affidabile per eliminare la saturazione. La protezione integrata elimina l’effetto dei parassiti e fornisce una risposta più rapida, nell’ordine di poche centinaia di nanosecondi. L’inverter e il motore necessitano di protezione da sovracorrente per eliminare la fuga termica durante le condizioni di sovraccarico. Gli azionamenti motore alimentati dalla linea a 230 V AC possono fornire una tensione del bus DC rettificata fino a 450 V DC, sia dalla tolleranza di tensione della linea AC sia utilizzando circuiti di correzione del fattore di potenza attiva.
Gli inverter devono essere progettati per una tensione di esercizio di 450 V. Alcuni azionamenti motore devono gestire tensioni più elevate per brevi periodi nel caso in cui la forza controelettromotrice generata dal motore superi la tensione di alimentazione o se si verifica un contraccolpo induttivo. Gli inverter potrebbero anche dover gestire una tensione di blocco off-state più elevata per prevenire danni in caso di scenari di sovratensione, come sovratensioni di linea in ingresso o eventi transitori elettrici molto rapidi.
Il DRV7308 è progettato con protezione integrata della tensione drain-to-source per proteggere il GaN FET durante gli eventi di sovracorrente. Ha anche comparatori di sovracorrente integrati per la limitazione della corrente ciclo per ciclo, progettati per una tensione di esercizio di 450 V con una tensione di blocco nominale off-state di 650 V. Altre protezioni monitorano scenari di guasto come sottotensione, sovracorrente e cortocircuiti pin-to-pin.
Conclusione
I progressi negli IPM basati su GaN come il DRV7308 continueranno ad aiutare ad aumentare la densità di potenza, l’erogazione di potenza e l’efficienza negli azionamenti motore per elettrodomestici e sistemi HVAC, risparmiando al contempo sui costi di sistema aumentando l’affidabilità.
Manu Balakrishnan è Systems engineer Motor drivers presso Texas Instruments.
Risorse addizionali
- DRV7308 Three Phase 650V, 5A, GaN Intelligent Power Module Data Sheet
- GaN IPM portfolio
- Texas Instruments GaN technology
- Influence of PWM Switching Frequency and Modulation Index on the Iron Losses and Performance of Slot-Less Permanent Magnet Motors
- Wide Bandgap Devices in AC Electric Drives: Opportunities and Challenges

 trifase massimizza le prestazioni del motore. Texas Instruments DVR7308.){kind=link}