

Il sensore radar a chip singolo AWRL1432 di Texas Instruments consente il rilevamento accurato di oggetti entro un raggio compreso tra 4 cm e 10 metri dando ai conducenti più tempo per reagire e manovrare in sicurezza.
Gli attuali sistemi di parcheggio utilizzano principalmente sensori a ultrasuoni, una soluzione a basso costo in grado di rilevare oggetti nelle vicinanze. Sebbene questa tecnologia sia ben consolidata, i produttori OEM devono soddisfare i requisiti in continua evoluzione per l’assistenza al parcheggio e le applicazioni di parcheggio autonomo in un mercato sensibile ai costi, mentre i produttori di livello 1 vedono diminuire i ritorni sui loro sforzi per ottenere maggiori prestazioni dal rilevamento a ultrasuoni.
La prossima generazione di sistemi di assistenza al parcheggio e di parcheggio autonomo richiederà il rilevamento dell’ambiente circostante al veicolo con maggiore risoluzione, precisione e portata rispetto a quanto è possibile con il solo rilevamento a ultrasuoni.
Dove vengono impiegati oggi i sensori a ultrasuoni
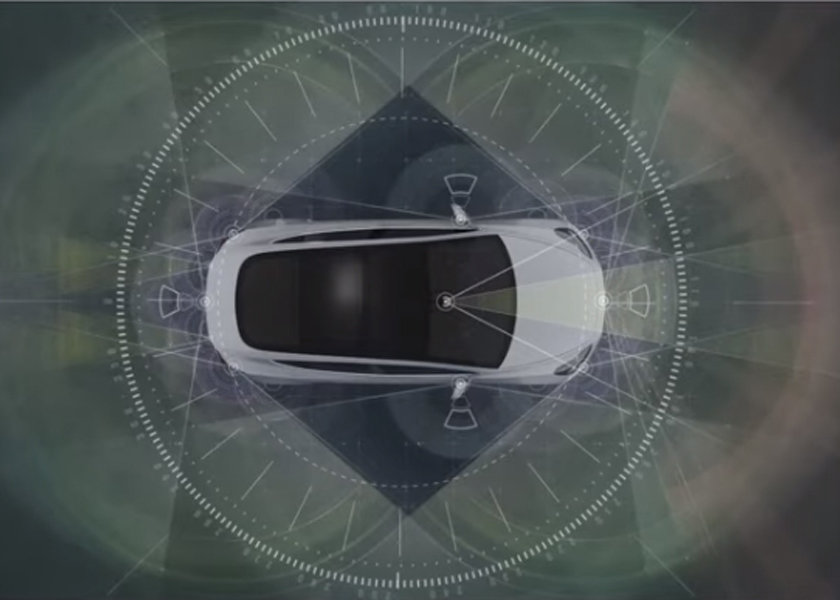
I sistemi di parcheggio a ultrasuoni variano in termini di livelli di autonomia, dall’avvisare i conducenti di oggetti rilevati alla manovra del veicolo negli spazi di parcheggio con l’assistenza del rilevamento della telecamera. Come mostrato in Figura 1, questi sistemi utilizzano da 8 a 12 sensori a ultrasuoni posizionati attorno al veicolo per ottenere una copertura completa, con un raggio di rilevamento tipico compreso tra 10 cm e 5 m.
I sensori ad ultrasuoni rilevano gli oggetti emettendo onde sonore che vengono riflesse dagli oggetti; misurano il tempo trascorso tra l’emissione dell’onda sonora e la ricezione dell’eco per calcolare la distanza degli oggetti vicini. Oggi, questi sensori in genere inviano l’intera forma d’onda del segnale ricevuto su canali DSI3 (Distributed System Interface) ad alta velocità a un’unità di controllo elettronico (ECU) centrale per la fusione dei dati dei sensori.
A differenza dei sensori a ultrasuoni che emettono onde sonore, i sensori radar a onde millimetriche (mmWave) rilevano gli oggetti emettendo onde elettromagnetiche. Questi segnali si riflettono sugli oggetti circostanti. Il sensore mmWave misura i cambiamenti nelle proprietà degli oggetti rilevati per calcolarne la distanza, la velocità e l’angolo di arrivo.
La popolarità del radar mmWave a 77 GHz è cresciuta costantemente sia nei sistemi avanzati di assistenza alla guida che per le applicazioni tutto intorno alla carrozzeria, grazie alla sua ampia larghezza di banda RF che consente misurazioni precise di portata e velocità. Nonostante il basso costo, dispositivi come il sensore radar a chip singolo AWRL1432 di Texas Instruments consentono il rilevamento accurato di oggetti entro un raggio compreso tra 4 cm e 10 metri e oltre, a seconda della configurazione dell’antenna. Questa portata estesa rileva gli ostacoli in anticipo, dando ai conducenti più tempo per reagire e manovrare in sicurezza.
Vantaggi dell’utilizzo dei sensori radar per l’assistenza al parcheggio
I sensori a ultrasuoni sono ottimizzati per la trasmissione delle onde sonore attraverso un tipo di mezzo come l’aria; pertanto, condizioni ambientali come fango, pioggia e nebbia possono limitarne le prestazioni. Al contrario, le onde elettromagnetiche utilizzate dal radar mmWave non richiedono un mezzo di trasmissione e possono fornire un rilevamento preciso degli oggetti in qualsiasi condizione esterna. Inoltre, i sensori radar sono generalmente meno soggetti a false letture rispetto ai sensori a ultrasuoni, offrendo una soluzione affidabile per le funzioni di assistenza al parcheggio.
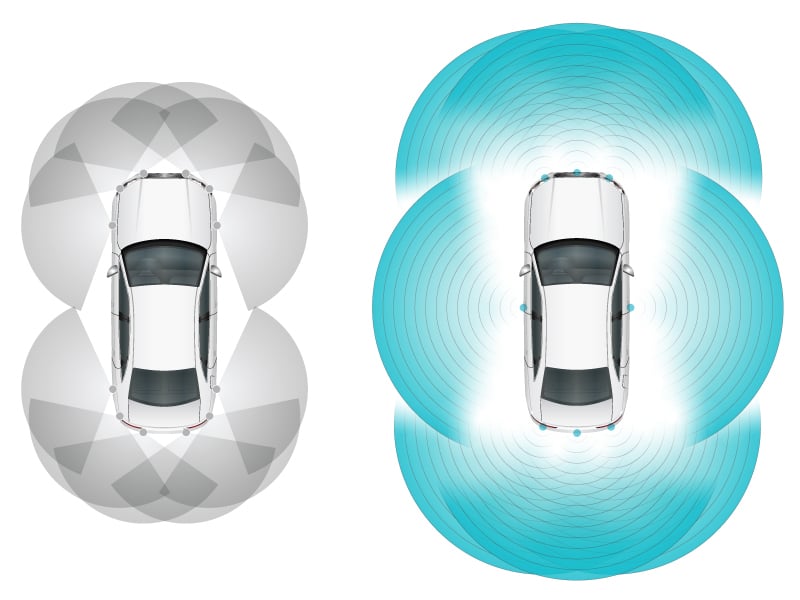
Inoltre, poiché i sensori a ultrasuoni sono influenzati dai mezzi attraverso i quali si propagano le onde sonore, l’installazione di un sistema di parcheggio a ultrasuoni in un veicolo comporta un difficile processo di perforazione e verniciatura dei fori nel paraurti, che comporta un costo significativo per gli OEM. Al contrario, i sensori radar mmWave possono essere montati sul paraurti del veicolo come mostrato nella Figura 2, semplificando l’installazione e preservando l’estetica.
Il sensore radar AWRL1432 mmWave di Texas Instruments integra il front-end analogico con un back-end di elaborazione digitale, consentendo il trasferimento dei dati di output elaborati su un canale dati flessibile Controller Area Network adatto per il processo decisionale da parte dell’ECU centrale. In confronto, il cablaggio DSI3 necessario per comunicare i dati della forma d’onda dai sensori a ultrasuoni all’ECU centrale è molto più costoso. È inoltre possibile utilizzare il sensore AWRL1432 insieme ai radar angolari esistenti sui veicoli, che stanno diventando comuni, consentendo il riutilizzo multiuso del sensore in un sistema di rilevamento con sempre più limiti di spazio.
Conclusione
Il sensore AWRL1432 offre una portata, una risoluzione e una precisione maggiori per contribuire a soddisfare gli attuali requisiti non solo per l’assistenza al parcheggio, ma anche per il rilevamento degli angoli ciechi entry-level e per applicazioni future con maggiore autonomia come il parcheggio con assistente. La sua architettura a basso consumo richiede meno energia e introduce modalità di inattività e di sospensione profonda, offrendo i vantaggi del radar nelle applicazioni di apertura e di rilevamento delle porte che richiedono l’alimentazione a batteria.
Il sensore AWRL1432 non solo consente agli OEM e ai produttori di livello 1 di migliorare le prestazioni del radar nei sistemi di parcheggio, ma consente anche l’implementazione in applicazioni esterne precedentemente limitate da costi e potenza. Queste funzionalità consentono lo sviluppo di radar multiuso definiti dal software in grado di riutilizzare lo stesso hardware e abbreviare i cicli di progettazione tra le applicazioni per la prossima generazione di rilevamento.
Jin Lee è Software Application Engineer presso Texas Instruments

{kind=link}