

 Con l’affermarsi della tendenza dell’open-space per case e uffici, e la migrazione verso i veicoli elettrici ibridi ed elettrici, la domanda di sistemi di controllo per motori elettrici più silenziosi sta aumentando in modo significativo. Anche le più piccole differenze nell’acustica possono fare una grande differenza nel rumore udibile.
Con l’affermarsi della tendenza dell’open-space per case e uffici, e la migrazione verso i veicoli elettrici ibridi ed elettrici, la domanda di sistemi di controllo per motori elettrici più silenziosi sta aumentando in modo significativo. Anche le più piccole differenze nell’acustica possono fare una grande differenza nel rumore udibile.
In Figura 1 si può vedere come gli elettrodomestici in uno spazio abitativo contribuiscono ai livelli di rumore complessivi. Tecniche avanzate di controllo in tempo reale possono aiutare a ottenere migliori prestazioni acustiche per i vari sistemi, compresi i circuiti di controllo del motore con densità di potenza più elevata, maggiore integrazione e sistemi più efficienti. Alcune strategie aggiuntive includono algoritmi di controllo vettoriale orientato al campo (FOC) che utilizzano la modulazione PWM, algoritmi di controllo specifici per ridurre le vibrazioni e controllo integrato per applicare la compensazione del tempo morto e la generazione di PWM per ridurre il rumore udibile.

Con tutti questi diversi prodotti e strategie per ridurre il rumore udibile nelle applicazioni di controllo del movimento, potrebbe essere difficile sapere quale sia la strategia migliore per una specifica applicazione. In questo articolo, elencherò i tre modi principali per ridurre il rumore udibile nelle applicazioni di controllo del movimento, utilizzando come esempio i gate driver di controllo per motori BLDC.
PWM
La prima strategia per ridurre il rumore udibile nelle applicazioni di controllo del movimento è il PWM continuo. PWM è una tecnica che genera forme d’onda di uscita accendendo e spegnendo i transistor, con il risultato che la tensione del motore è alta o bassa in un dato momento. L’induttanza nel motore filtra queste forme d’onda per ottenere essenzialmente una media della forma d’onda di uscita. La regolazione del duty cycle (il rapporto tra il tempo in cui la forma d’onda è attiva e il tempo in cui è disattivata) cambierà la tensione media. La Figura 2 illustra un esempio di generazione di onde sinusoidali mediante PWM.

Ad esempio, il gate driver integrato per controllo BLDC MCF8315A di Texas Instruments, un driver FOC senza sensori, implementa schemi PWM del vettore spaziale continuo e discontinuo. La modulazione continua aiuta a ridurre l’ondulazione di corrente per i motori con bassa induttanza, ma si traduce in maggiori perdite di commutazione perché tutte e tre le fasi risultano in commutazione. La modulazione discontinua ha perdite di commutazione inferiori (poiché vi sono solo due fasi che commutano alla volta) ma un’ondulazione di corrente più elevata. Nelle Figure 3 e 4, è possibile vedere le differenze tra PWM continuo e discontinuo.

Compensazione dei tempi morti
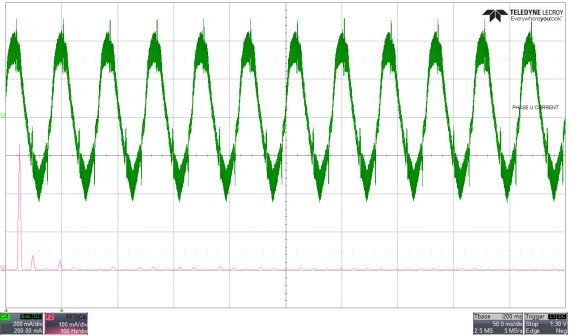
La seconda strategia utilizzata per ridurre il rumore udibile nelle applicazioni di controllo del movimento è la compensazione del tempo morto. Nelle applicazioni di controllo motore, l’inserimento di un tempo morto tra la commutazione dei transistor MOSFET sul lato alto e basso in un semiponte può evitare una condizione di shoot-through. Dopo aver inserito il tempo morto, la tensione prevista e la tensione applicata al nodo di fase differiranno e la tensione del nodo di fase introdurrà una distorsione indesiderata nella corrente di fase, causando un rumore udibile.
Per gestire questo rumore aggiuntivo, i progettisti possono integrare la compensazione del tempo morto utilizzando un controller risonante che agisce sulla componente armonica nella corrente di fase, alleviando la distorsione di corrente causata dal tempo morto, come mostrato in Figura 5.
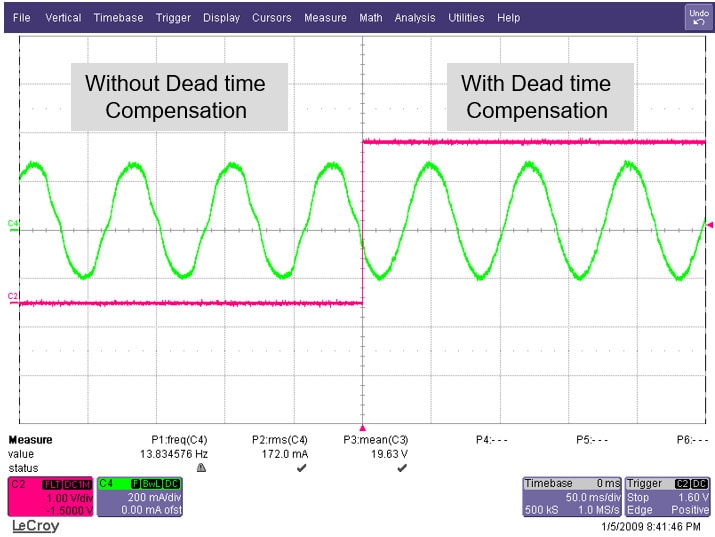
Ad esempio, il gate driver MCF8316A di Texas Instruments, un driver del motore FOC senza sensori, utilizza questa funzione integrata per ottimizzare l’acustica su più velocità, come mostrato nella Figura 6.
Modi di commutazione variabili
L’ultima tecnica per ridurre il rumore udibile nelle applicazioni di controllo del movimento è la modalità di commutazione variabile. Nella commutazione trapezoidale, ci sono due configurazioni principali: 120 gradi e 150 gradi. Un angolo trapezoidale di 120 gradi può causare più rumore acustico poiché il lungo periodo ad alta impedenza provoca un aumento dell’ondulazione della coppia; vedere le figure 7 e 8. Il trapezoidale a 150 gradi può funzionare solo a basse velocità, data la piccola finestra per rilevare il passaggio per lo zero.
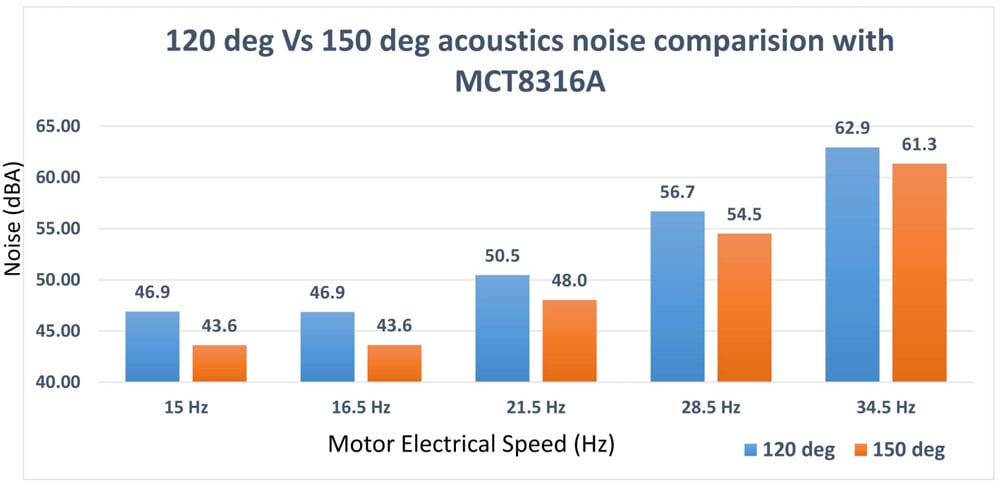
Per combattere queste sfide e migliorare le prestazioni acustiche, gli ingegneri possono costruire sistemi di azionamento del motore in grado di passare dinamicamente tra 120 gradi trapezoidali e 150 gradi trapezoidali. Questa modulazione dinamica può migliorare le prestazioni acustiche complessive durante il controllo del motore BLDC.
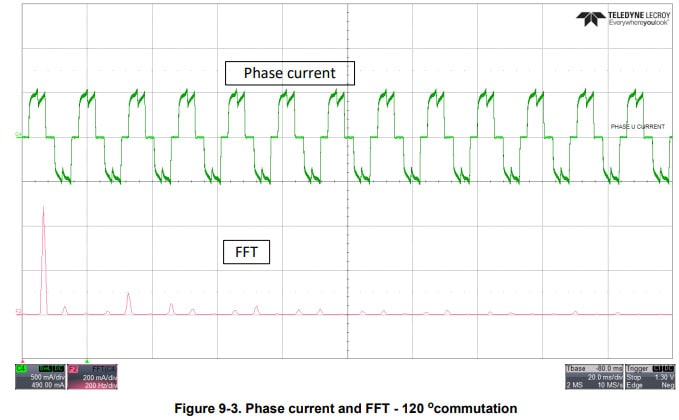
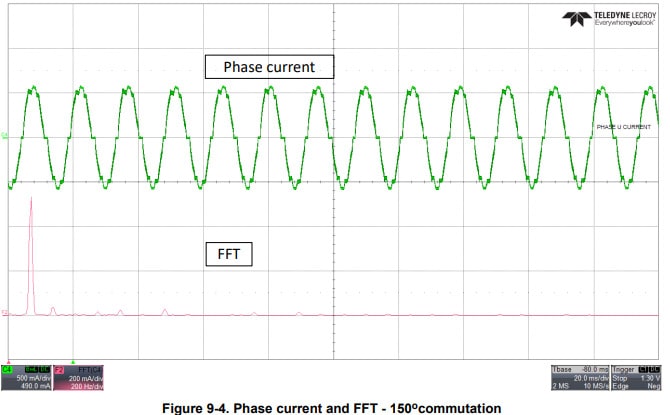
Ad esempio, i gate driver sensorless BLDC con controllo trapezoidale di TI, come MCT8329 e MCT8316, utilizzano questa funzione integrata per ottimizzare l’acustica su più velocità elettriche, come mostrato nella Figura 9.
Conclusione
Texas Instruments sta investendo nelle tecnologie di controllo del movimento per aiutare a costruire sistemi più efficienti e sensibili all’acustica, con elementi costitutivi progettati per soddisfare i requisiti acustici. Durante la progettazione del sistema, vanno considerati con attenzione i tre modi principali descritti nell’articolo per ridurre il rumore udibile nelle applicazioni di controllo del movimento.
Risorse addizionali
- Rapporto: “Come ridurre il rumore del motore con i driver per motori BLDC sensorless senza scrivere codice“
- Video: “Riduzione del rumore udibile del motore con i driver per motori BLDC“.
- Applicazione: “Azionamenti per motori BLDC sensorless ad alta efficienza e senza codice per sistemi scalabili“.
- Ulteriori informazioni sui seguenti argomenti:
– driver BLDC integrati di TI
– driver per motori BLDC
– processori basati su Arm
– microcontrollori in tempo reale C2000
– microcontrollori MSP430
Robert Wedan è Technical Marketing Engineer presso Texas Instruments.

{kind=link}