


Considerazioni di progettazione per soluzioni di controllo motore centralizzate o distribuite e microcontrollori real-time che le abilitano.
Solitamente i sistemi robotici automatizzano attività ripetitive, gestendo movimenti complessi e potenti e lavorando in ambienti pericolosi o dannosi per l’uomo. Anche in questo caso, microcontrollori (MCU) più integrati e con prestazioni più elevate consentono una maggiore efficienza energetica e movimenti più fluidi e sicuri con una precisione molto più elevata, aumentando di conseguenza la produttività e l’automazione. Ad esempio, una maggiore precisione – a volte entro 0,1 mm – è importante per le applicazioni che gestiscono la saldatura laser, i rivestimenti di precisione o la stampa a getto d’inchiostro o 3D.
Il numero di assi in un braccio robotico e il tipo di architettura di controllo necessaria (centralizzata o distribuita, nota anche come decentralizzata) determineranno le caratteristiche del migliore microcontrollore da utilizzate in quel sistema di controllo motore. Le moderne fabbriche utilizzano un mix di robot con un numero variabile di assi, definiti come il grado di movimento e rotazione sui piani x, y o z, per gestire le diverse fasi della produzione; pertanto, esistono varie architetture di controllo.
È importante scegliere MCU con un margine prestazionale aggiuntivo per garantire la scalabilità futura, nonché la capacità di supportare funzionalità aggiuntive. La pianificazione della scalabilità e delle funzionalità aggiuntive può ridurre costi, tempi e complessità durante il processo di progettazione.
In questo articolo esplorerò le architetture di controllo motore centralizzate e distribuite e le considerazioni di progettazione per i microcontrollori real-time che le abilitano. Per informazioni sulle principali sfide di progettazione dell’azionamento dei motori per la robotica, è disponibile il seguente articolo tecnico: “How motor drive innovations are helping solve robotic movement design challenges.”
Architettura centralizzata
In un sistema centralizzato (Figura 1), un MCU controlla più assi. Questo approccio è efficace nel gestire la dissipazione del calore nei driver dei motori ad alta potenza (in genere superiore a 2-3 kW) che richiedono grandi dissipatori di calore e ventole di raffreddamento. In questa architettura, i dati di posizione vengono solitamente acquisiti esternamente tramite una scheda resolver o un aggregatore collegato agli encoder.
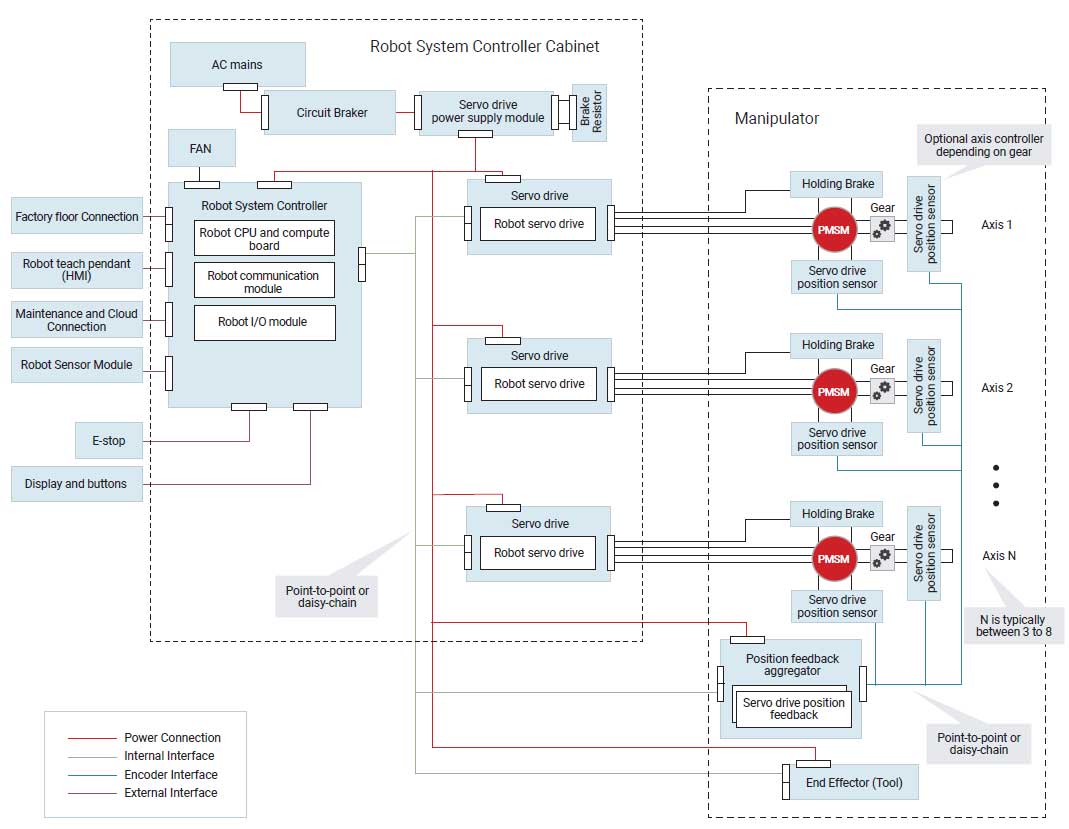
Figura 1 – Schema a blocchi di un’architettura centralizzata di controllo motore per sistemi multiasse.
Tipicamente, in questa architettura, più stadi di potenza si trovano sullo stesso circuito stampato o in stretta vicinanza; pertanto, un MCU può controllare più assi. Questo approccio semplifica il controllo in tempo reale e la sincronizzazione tra più assi, poiché non sono necessarie lunghe linee di comunicazione tra più MCU di controllo motore.
Il microprocessore di controllo motore in un’architettura centralizzata richiede principalmente core di elaborazione in tempo reale ad alte prestazioni come i core Arm Cortex-R5F o processori di segnali digitali, interfacce di comunicazione in tempo reale come EtherCAT e un numero sufficiente di canali PWM e periferiche per il rilevamento di tensione e corrente. Gli MCU come AM2432 possono abilitare sistemi multiasse scalabili e offrire periferiche di controllo in tempo reale per un massimo di sei assi nonché comunicazioni in tempo reale in un singolo chip.
In passato, per il controllo centralizzato dei motori nei sistemi automatizzati, venivano utilizzati principalmente FPGA o circuiti integrati specifici per l’applicazione. Tuttavia, l’elevato livello di integrazione e il rapporto costo-prestazioni degli MCU Arm Cortex possono aiutarti a soddisfare i requisiti prestazionali del sistema consentendo al tempo stesso scalabilità e flessibilità di progettazione.
Sebbene le architetture di controllo centralizzato possano soddisfare i requisiti di progettazione di prestazioni ed efficienza di sistemi automatizzati ad alta potenza come i robot industriali con carico utile elevato, sono richiesti cavi aggiuntivi dall’armadio al motore meccanico nel giunto, nonché dai sensori di posizione e dagli aggregatori. Questi cavi non solo costano di più, ma si usurano e richiedono manutenzione.
Architettura decentralizzata
Le architetture decentralizzate (Figura 2) sono recentemente diventate popolari per i sistemi con requisiti di potenza inferiori e sono diventate l’approccio standard per i manipolatori di robot collaborativi (cobot).
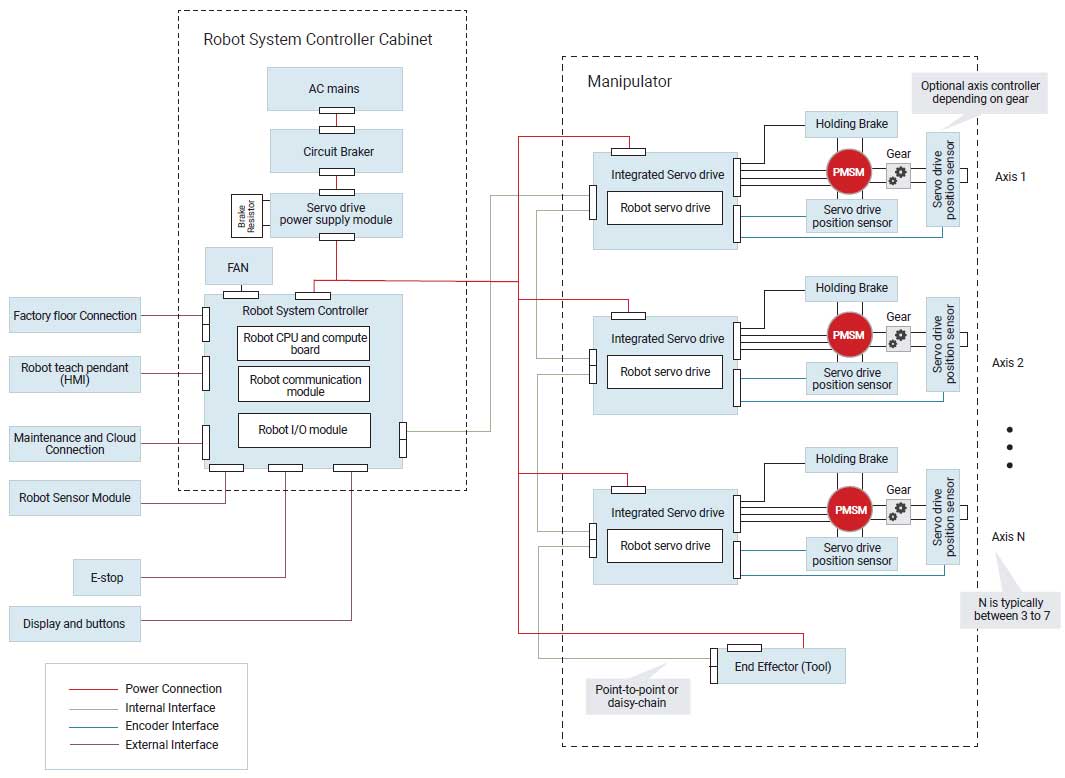
Figura 2 – Schema a blocchi di un’architettura di controllo motore decentralizzata per sistemi monoasse.
Le architetture decentralizzate integrano più azionamenti motore monoasse in ciascun giunto all’interno del robot, collegati e sincronizzati tramite un’interfaccia di comunicazione in tempo reale come EtherCAT. Ogni azionamento controlla solitamente un singolo asse e gestisce localmente determinate funzioni di sicurezza. Pertanto, ogni MCU necessita di capacità di comunicazione e controllo in tempo reale, periferiche di controllo motore per un singolo asse, da tre a sei canali PWM, convertitori analogico-digitali con registro ad approssimazioni successive su chip o ingressi modulatori delta-sigma.
In queste applicazioni, il sensore di posizione solitamente si trova accanto all’MCU, quindi questi MCU necessitano di un’interfaccia digitale o analogica per leggere i dati dal sensore di posizione. Sebbene questa architettura richieda più MCU, la riduzione dei costi a livello di sistema può essere significativa, poiché saranno necessari meno cavi tra il bus di alimentazione e l’interfaccia di comunicazione. I moderni MCU in tempo reale come TMS320F28P650DK di Texas Instruments integrano tutte le periferiche necessarie, comprese le periferiche di sicurezza, che possono consentire soluzioni a uno o due chip per un asse integrato in architetture decentralizzate con prestazioni elevate in dimensioni ridotte.
Conclusione
Anche se i motori potrebbero non essere il sistema più trendy di un robot – soprattutto se paragonati ai sistemi abilitati all’intelligenza artificiale – sono i “muscoli” che mantengono le fabbriche in movimento. Potrebbero rappresentare la parte più cruciale della produzione moderna, quindi la scelta del giusto dispositivo di controllo merita molta considerazione. Man mano che questi dispositivi diventano sempre più integrati, funzionalità aggiuntive come l’edge computing e la connettività wireless potrebbero farsi strada nei progetti di controllo dei motori.

 contribuiscono ad aumentare le prestazioni.){kind=link}